Physics
FIT ČVUT, ZS 2019
Ing. Adam Vesecký
vesecky.adam@gmail.com
Czech technical University in Prague
Faculty of Information Technology
Department of Software Engineering
© Adam Vesecký, MI-APH, 2019
Physics engine features
Physics engine
- System that simulates physical phenomena
- computes motion of objects in virtual scene
- simulation must be real-time (accuracy is not that important)
- you have to understand your game before you decide how to add a physical simulation to it
- can improve immersion
- can support new gameplay events
- can broke the game story
- takes significant computing resources
- is based on heavy magic tricks that are difficult to comprehend
Physics engines
N-Collide
- 2D and 3D collision detection library written in Rust
Box2D
- open-source C++ 2D physics engine
- supports CCD (continuous collision detection)
Bullet
- open-source 3D physics engine
- used in game and film industry
- supports CCD
PhysX
- it can run using Nvidia's GPU
- PhysX destruction, PhysX Clothing, PhysX particles
p2.js
- modular JavaScript engine, supports CCD
Havok
- gold commercial standard
Physics engine steps

Physics vs animation
- physics animation!!
- animations must at least partially bypass physics in order to run seamlessly
- cut-scenes and state-transition animations are detached from physics
General purpose simulators
- offer the dream of environment where everything is physically simulated
- Pinball series (1980+), Incredible Machines (1993), Little Big Planet (2008), Angry Birds (2009)
- for instance, in GTA V, the player can interact with less than 0.1% objects!
Physics engine features
- collision detection (CCD or sub-stepping)
- contact callbacks
- joints
- concave and convex hulls
- compound bodies
- sleeping objects
- raycasting, shapecasting
- deformable structures
- destructible structures
- trigger volumes
- complex machines
- drivable vehicles
- rag doll characters
- water surface, hair, cloth
- particles
Example: Half-life 2
- Havok Engine
- destructible environment
- simulating gravity, friction, mass, momentum, inertia,...
- liquid physics with displacement, viscosity, adhesion

Example: Inside
- published in 2016, proprietary physics and game engine
- Huddle Potato
- custom physics model developed by Thomas Krog
- its core was simulated by 26-body-simulation procedures
- it was driven by a network of impulses based on the direction of the player
- often reconfiguration was needed in order to fit into tight spaces
Object types
Body
- fundamental object in the physics scene
Rigid Body
- idealized, infinitely hard, non-deformable solid object
- physics-driven bodies - driven entirely by the simulation
- game-driven bodies - moved in a non-physical way (animations)
- fixed bodies - collision-only bodies
Soft Body
- can be deformed
Shape
- region of space described by a boundary, with a definite inside and outside (curved line, polygon, curved surface, polyhedron)
Fixture
- used to describe size, shape and material properties
Object types
Constraint
- connects bodies together in order to simulate interaction (ropes, wheels, vehicles, chains)
Sensor/Phantom
- entity that provides a feedback when certain objects overlap
- participates on collision detection but doesn't affect the scene
Rag doll
- displays human-like figures with a realistic motion
Destructible object
- breakable object, can be implemented by using rigid body dynamics, dividing the model into a number of breakable pieces
Constraints
- Revolute - a hinge or pin, where the bodies rotate
- wheels, chains, rotating doors, catapults, levers
- Distance - a point on each body will be kept at a fixed distance apart
- Rope - restricts the maximum distance between two points
- Prismatic - body's motion is restricted to a single degree of freedom
- elevators, sliding doors, pistons
- Weld - holds the bodies at the same orientation
- Cone-Twist - adds a cone and twist axis limits (6 degrees of freedom)
- Gear - controls two other joints so that the movement of one affects the other
- Motor - joint with torque or angular impulses

Constraints

rope

revolute

prismatic

cone-twist
Constraints


Collision detection
Collision Detection

common issues of simple platformers
Steps
- positions for the next frame are determined
- a spatial data structure finds collision candidates
- collision candidates are filtered out into a set of real collision pairs
- collisions are resolved by the collision resolver (by applying impulses or penalty forces)
- constraints are satisfied by the constraint resolver
Collidable entities
- we need to provide a collision representation for each object
- simple shapes are preferred (a car might be modelled as a rectangle)
- more-complex shapes should be used only when the simple ones provide inadequate information to achieve the desired behavior
- if collidable entities don't overlap, no more testing is required
- if they do overlap, more refined testing is required
Example: Unity interaction matrix
| Static Collider | Rigidbody Collider | Kinematic Rigidbody Collider | Static Trigger Collider | Rigidbody Trigger Collider | Kinematic Rigidbody Trigger Collider | |
|---|---|---|---|---|---|---|
| Static Collider | collision | trigger | trigger | |||
| Rigidbody Collider | collision | collision | collision | trigger | trigger | trigger |
| Kinematic Rigidbody Collider | collision | trigger | trigger | trigger | ||
| Static Trigger Collider | trigger | trigger | trigger | trigger | ||
| Rigidbody Trigger Collider | trigger | trigger | trigger | trigger | trigger | trigger |
| Kinematic Rigidbody Trigger Collider | trigger | trigger | trigger | trigger | trigger | trigger |
Primitives
Sphere
- center point and radius (4 numbers)
Capsule
- 2D: rectangle and two circles
- 3D: cylinder and two hemispherical end-caps
- representation: two points and radius

AABB
- axis-aligned bounding box
- rectangular volume (cuboid) whose faces are parallel to the axes of the coordinate system
- very efficient test for penetration
- AABB must be recalculated whenever the object rotates
Primitives



OBB
- oriented bounding box
- defined by a position, half-extents and orientation
- commonly used
k-DOP
- discrete oriented polytope
- more-general case of AABB and OBB
- approximates the shape of an object
Convex volume
- more general shape
- must be convex
- expensive for intersection test
Primitives




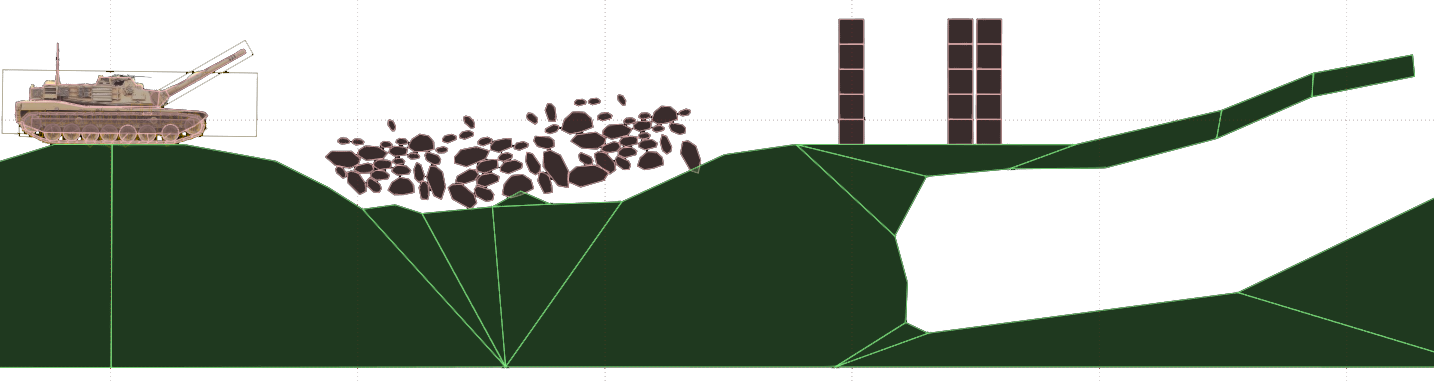
Poly Soup
- used to model complex static geometry (terrain)
- very expensive kind of collision test
Compound shapes
- more-efficient alternative to a poly-soup
- the system first tests bounding volumes of compound shapes
Convex hull
- smallest convex volume containing the object
Complex shape/volume
- not necessarily convex
- simplified mesh/sprite
- needs preprocessing (BSP)
Comparison


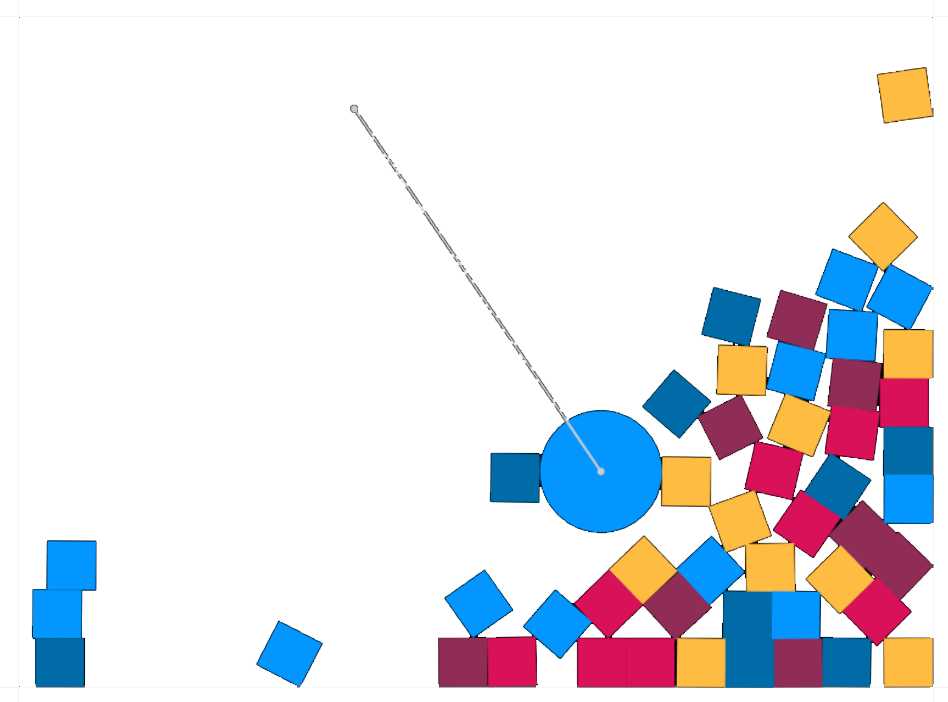
Example: Box2D

Looking for collision candidates
Naive solution
- each pair
- -> 10 objects result in 100 checks, 100 in 10 000 etc.
Quad-tree
- efficiency usually , since the index takes about comparisons to traverse
- good for point-like small objects
- worst-case:
Sweep and Prune
- sorts the starts (lower bound) and ends (upper bound) of bounding volumes of each solid along a number of axes
BSP
- binary space partitioning, good for complex static geometries (facilities, buildings)
Grid, Oct-tree, R-Tree, R+tree, R*-tree, X-tree, M-tree,...
Resolving collision candidates
Sphere-sphere
- where is a central point
Sphere-ray
- we just test the distance between a single sphere center and a ray
AABB-AABB
- test the borders
AABB-Ray
- intervals and mustn't overlap

Resolving collision candidates
Capsules
- capsule-capsule - calculate the distance between two line segments
- capsule-ray - find the distance between a ray and a line segment
OBB-OBB
- axis-separating theorem by Gottschalk
Triangles
- triangle-triangle - compute the plane equation and test each point if it lies on the same side
- triangle-ray - Möller's affine combination

SAT

SAT (separating axis theorem)
- based on collection of intersection tests
- if an axis can be found along which the projection of two convex shapes do not overlap, then the two shapes do not intersect
- for 2D: AABB 2 axes, OBB 4 axes
- for 3D: AABB 3 axes, OBB 15 axes
Other methods
- GJK, Line Sweep, Sphere test,...
Example: SAT

- AABB in 2D: only 2 axes to check
Tunneling problem

Stepped world
- time steps vary based on occurring situation
- collision time is calculated by doing binary search in time, moving object back and forth by 1/2 steps (5 iterations is usually enough)
Continuous Collision Detection (CCD)
- uses Swept Shapes
- a new shape is formed by the motion of the original one
- rotating shapes may result in shapes that aren't convex

Collision queries
Queries:
- Find the first target the bullet hits
- Can a camera move without interpenetrating the wall?
- Find all objects within a given radius
Ray casting
- any game is going to need a good raycaster
- the cast line segment is tested against the collidable objects in the collision world; if it intersects any of them, the contact point is returned
- weapon systems, player mechanics, AI systems, vehicle systems, line-of-sight
- used in 80's and 90's also for pseudo-3D rendering, nowadays it's being replaced by raytracing
Shape casting
- how far a shape would be able to travel along a directed line segment before it hits something
- sphere casts - e.g. to determine whether the camera is in a collision
- capsule casts - e.g. character movement on uneven terrain
Collision response
How to respond to a collision?
Explosion
- adding energy to a system of rigid bodies
Fracturing
- breaking objects apart
Restitution
- amount of bounce an object has when it hits something
Impulsive response
- when two bodies collide, the bodies compress slightly and then rebound, changing their velocities, losing energy
Friction
- force that arises between two bodies that are in continuous contact, resisting their movement relative to one another
- removes energy from a system of rigid bodies
- static, dynamic, rolling
Collision resolver
Collision resolving
- LCP - Linear Complementarity Problem
- very complex numeric algorithms
- resolvers: PGS, Dantzig solver, Lemke method, Jacobi method
Coming to rest
- all objects lose energy, leading to eventual rest
- not simple (floating-point error, inaccuracies, numerical instability)
- sleep criteria
- momentum or energy are below a threshold
- simulation islands
- grouping objects that either are interacting or have a potential to interact
- sleep criteria
Sleeping objects

Fracturing

- breaking an object into smaller fragments
- in many cases destruction is not dynamic (can be made using animations)
- techniques: manual fracturing, boolean operations, Voronoi Shattering
Particle systems
Particle systems
- a collection of point masses that obeys certain physical laws
- can model complex fuzzy shapes and dynamics
- heavily used Flyweight pattern (array of positions, velocities, group lists)
- particles are not only moving points! Even a tree may become a particle!
Applications
- fluids
- visual effects
- flocks
- rendered trails (plants)
- soft bodies (flag, cloth)
Basic model
- generate new particles
- assign individual attributes
- extinguish dead particles
- move and transform particles according to their dynamic attributes
- render meshes
Attributes
- position
- velocity
- orientation
- acceleration
- mass
- size
- color
- lifetime
- material
- temperature
Particle systems in games

Example: Fairlight
- a demoscene group that pushed the idea about particle systems to absolute hardware limits
Agenda Circling Forth (2010)

Instant God (2016)
Liquidfun
- 2D rigid body and fluid simulation library, Box2D extension
- Android, iOS, Windows, OS X
- phase 1: collision detection
- find pairs of particles closer than the particle diameter
- phase 2: apply pressure
- sum up the weight of contacts for each particle
- calculate the pressure and apply repulsive forces
- phase 3: apply other forces
- viscous force, spring force, elastic force,...
- phase 4: update positions
- phase 5: handle interaction with Box2D
Example: Noita

- WIP game that uses a falling sand-style simulation
- each pixel is considered a particle having their own attributes
- flood-algorithm for ignition effects
- each screen is divided into 64x64 chunks processed in 4 stages from the bottom up
Lecture 7 Review
- Physics engine steps: apply forces, update positions, detect and resolve collisions and constraints
- Object types: Body, Rigid Body, Soft Body, Shape, Fixture, Constraint, Sensor, Rag doll, Destructible object
- Constraints: revolute, distance, rope, prismatic, weld, cone-twist, gear, motor
- Primitives: sphere, capsule, AABB, OBB, k-DOP, Convex volume, Poly Soup, Compound shapes, Convex hull, Complex volume
- SAT (separating axis theorem
- if an axis can be found along which the projection of two convex shapes do not overlap, then the two shapes do not intersect
- Tunneling problem - handled by stepped world or CCD
- Collision queries: ray casting, shape casting
- Particle systems - a collection of point masses that obeys certain physical laws
Goodbye quote
Didn’t we have some fun though?